投影變換及坐標系統
官方說明資料 https://www.opengl.org/wiki/Main_Page在OPENGL中采用的是三維笛卡爾坐標系。
PC版本OpenGl支持多種多邊形,但是在OpenGL ES下只支持三角形。
也就是說,所有圖形都由三角形構建,類似積分的原理。
在计算机图形学中有两种类型的投影方式:透视投影与正交投影。采用透视投影,物体越远越小,这样更接具真实性。正交投影往往用于2D绘制

投影變換
在OpenGL中,如果想对模型进行操作,就要对这个模型的状态(当前的矩阵)乘上这个操作对应的一个矩阵.
如果乘以变换矩阵(平移, 缩放, 旋转), 那相乘之后, 模型的位置被变换;
如果乘以投影矩阵(将3D物体投影到2D平面), 相乘后, 模型的投影方式被设置;
如果乘以纹理矩阵(), 模型的纹理方式被设置.
如果乘以变换矩阵(平移, 缩放, 旋转), 那相乘之后, 模型的位置被变换;
如果乘以投影矩阵(将3D物体投影到2D平面), 相乘后, 模型的投影方式被设置;
如果乘以纹理矩阵(), 模型的纹理方式被设置.
而用来指定乘以什么类型的矩阵, 就是glMatriMode(GLenum mode);
glMatrixMode有3种模式: GL_PROJECTION 投影, GL_MODELVIEW 模型视图, GL_TEXTURE 纹理.
所以,在操作投影矩阵以前,需要调用函数:glMatrixMode有3种模式: GL_PROJECTION 投影, GL_MODELVIEW 模型视图, GL_TEXTURE 纹理.
glMatrixMode(GL_PROJECTION); //将当前矩阵指定为投影矩阵
然后把矩阵设为单位矩阵:
glLoadIdentity();
然后调用glFrustum()或gluPerspective(),它们生成的矩阵会与当前的矩阵相乘,生成透视的效果;
有兩種投影(透視投影及正射投影)。投影要在創建的時候設置。
透視投影
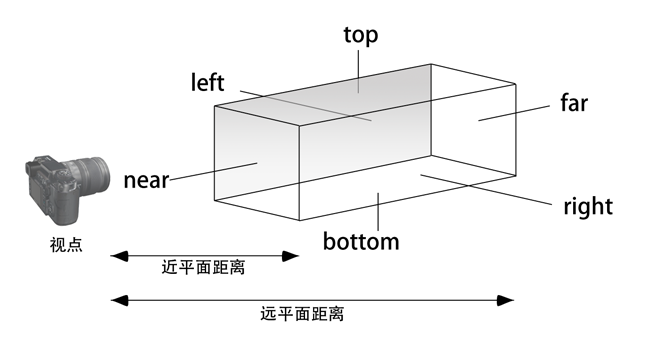
一個函數:void glFrustum(GLdouble left,GLdouble Right,GLdouble bottom,GLdouble top,GLdouble near,GLdouble far);
Ø 前四個参數是攝像頭視口。正常情況是成比例的。
Ø 第五個是近平面:可以認为近平面就對應着屏幕視口,不過近平面是Y向上,屏幕視口是Y向下。
Ø 第六個是遠平面:遠平面的一個作用是做裁切用。只有在近平面,元平面之間的物體才被顯示,超過的就裁切掉。
创建一个透视型的视景体。其操作是创建一个透视投影的矩阵,并且用这个矩阵乘以当前矩阵。这个函数的参数只定义近裁剪平面的左下角点和右上角点的三维空间 坐标,即(left,bottom,-near)和(right,top,-near);最后一个参数far是远裁剪平面的离视点的距离值,其左下角点和 右上角点空间坐标由函数根据透视投影原理自动生成。near和far表示离视点的远近,它们总为正值(near/far 必须>0)。

原始程式碼: https://www.opengl.org/wiki/GluPerspective_code
void glhFrustumf2(float *matrix, float left, float right, float bottom, float top, float znear, float zfar) { float temp, temp2, temp3, temp4; temp = 2.0 * znear; temp2 = right - left; temp3 = top - bottom; temp4 = zfar - znear; matrix[0] = temp / temp2; matrix[1] = 0.0; matrix[2] = 0.0; matrix[3] = 0.0; matrix[4] = 0.0; matrix[5] = temp / temp3; matrix[6] = 0.0; matrix[7] = 0.0; matrix[8] = (right + left) / temp2; matrix[9] = (top + bottom) / temp3; matrix[10] = (-zfar - znear) / temp4; matrix[11] = -1.0; matrix[12] = 0.0; matrix[13] = 0.0; matrix[14] = (-temp * zfar) / temp4; matrix[15] = 0.0; }
另一個函數:
void gluPerspective(GLdouble fovy,GLdouble aspect,GLdouble zNear, GLdouble zFar);
Ø 参數fovy定義視野在X-Z平面的角度,範圍是[0.0, 180.0];
Ø 参數aspect是投影平面寬度與高度的比率;
Ø 参數zNear和Far分別是遠近裁剪面沿Z負軸到視點的距離,它們總为正值。
OpenGL的视角设定可以直接调用gluPerspective函数,但是OpenGL ES版本并不支持这个用法。ES的版本中只能支持glFrustum的函数调用。
创建一个对称的透视型视景体,但它的参数定义于前面的不同,如图。其操作是创建一个对称的透视投影矩阵,并且用这个矩阵乘以当前矩阵。参数fovy定义视 野在Y-Z平面的角度,范围是[0.0, 180.0];参数aspect是投影平面宽度与高度的比率;参数Near和Far分别是近远裁剪面到视点(沿Z负轴)的距离,它们总为正值。
以上两个函数缺省时,视点都在原点,视线沿Z轴指向负方向。
void gluPerspective( GLdouble fovy, //角度 GLdouble aspect,//视景体的宽高比 GLdouble zNear,//沿z轴方向的两裁面之间的距离的近处 GLdouble zFar //沿z轴方向的两裁面之间的距离的远处 );

在OPENGL中我们可以使用gluPerspective来设置视椎体。PC版的gluPerspective在OPENGL3.0以後就好像不見了。
但是在OpenGLES中却没有提供这样的实用库支持,其实我们可以自己来完成这个函数的功能。代码如下:
//matrix will receive the calculated perspective matrix. //You would have to upload to your shader // or use glLoadMatrixf if you aren't using shaders. void glhPerspectivef2(float *matrix, float fovyInDegrees, float aspectRatio, float znear, float zfar) { float ymax, xmax; float temp, temp2, temp3, temp4; ymax = znear * tanf(fovyInDegrees * M_PI / 360.0); //ymin = -ymax; //xmin = -ymax * aspectRatio; xmax = ymax * aspectRatio; glhFrustumf2(matrix, -xmax, xmax, -ymax, ymax, znear, zfar); }
正射投影
正射投影的最大一個特點是無論物體距離相機多遠,投影後的物體大小尺寸不變。函數:
void glOrtho(GLdouble left,GLdouble right,GLdouble bottom,GLdouble top, GLdouble near,GLdouble far)
六个参数, 前两个是x轴最小坐标和最大坐标,中间两个是y轴,最后两个是z轴值
它创建一个平行视景体(就是一个长方体空间区域)。
实际上这个函数的操作是创建一个正射投影矩阵,并且用这个矩阵乘以当前矩阵。
其中近裁剪平面是一个矩形,矩形左下角点三维空间坐标是(left,bottom,-near),
右上角点是(right,top,-near);远裁剪平面也是一个矩形,左下角点空间坐标是(left,bottom,-far),右上角点是(right,top,-far)。
注意,所有的near和far值同时为正或同时为负, 值不能相同。如果没有其他变换,正射投影的方向平行于Z轴,且视点朝向Z负轴。这意味着物体在视点前面时far和near都为负值,物体在视点后面时far和near都为正值。
只有在视景体里的物体才能显示出来。
如果最后两个值是(0,0),也就是near和far值相同了,视景体深度没有了,整个视景体都被压成个平面了,就会显示不正确。
设置视图变换(Setting the View Transform)
设置视图矩阵最简单的方法就是用LookAt方法,它并不是OpenGL ES的内置函数,但是可以自已快速实现。它有三个参数:相机位置,目标位置,一个”up”向量表示相机朝向>通过三个向量的传入,LookAt就可以生成一个变换矩阵,否则就得用基本的变换(缩放,移动,旋转)来生成。
一個參考的 LookAt函数
mat4 LookAt(const vec3& eye, const vec3& target, const vec3& up)
{
vec3 z = (eye - target).Normalized(); vec3 x = up.Cross(z).Normalized(); vec3 y = z.Cross(x).Normalized();
mat4 m;
m.x = vec4(x, 0);
m.y = vec4(y, 0);
m.z = vec4(z, 0);
m.w = vec4(0, 0, 0, 1);
vec4 eyePrime = m * -eye; m = m.Transposed();
m.w = eyePrime;
return m;
}

一旦设置了设影矩阵, 就设定了视野。视锥表示眼在金字塔顶部的一个锥体。
基于金字塔的顶点(称为视野)的角度,可以计算一个视锥。开发者认为这样比指定六面更加直观。示例2.2中方法有四个参数:视角,金字塔宽高比,远与近裁剪面。
示例方法有四个参数:视角,金字塔宽高比,远与近裁剪面。
void VerticalFieldOfView(float degrees, float aspectRatio, float near, float far)
{
float top = near * std::tan(degrees * Pi / 360.0f);
float bottom = -top;
float left = bottom * aspectRatio;
float right = top * aspectRatio;
glFrustum(left, right, bottom, top, near, far);
}













